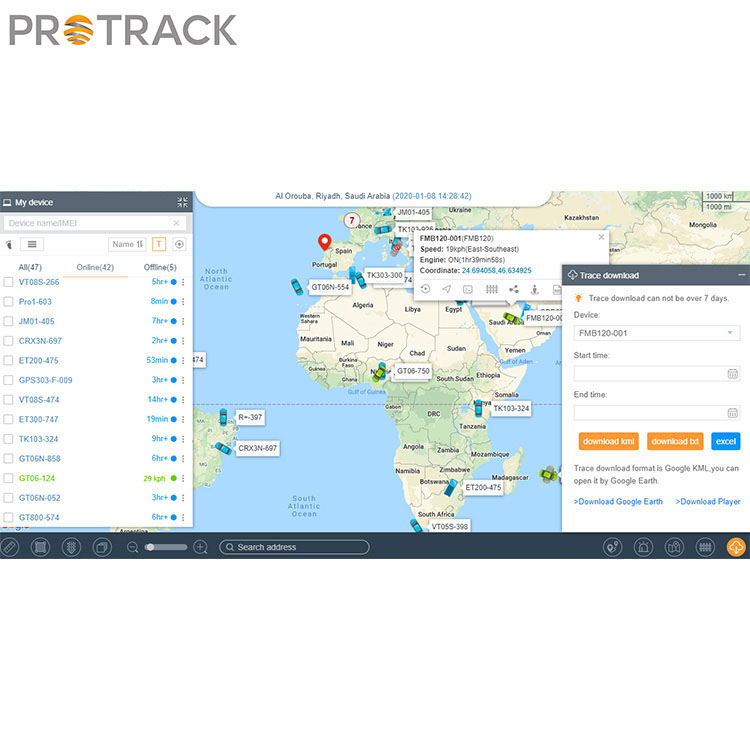
Platforma pro sledování GPS ProTrack nabízí inovativní přístup ke zvýšení bezpečnosti flotily. Pomocí protack GPS Tracker mohou manažeři flotily sledovat umístění vozidel v reálném čase a umožnit proaktivní rozhodování. Klienti využívající tuto platformu hlásí významné snížení nehod a neoprávněného využití vozidla, které jsou rozhodující pro udržování bezpečné flotily.

V dnešním rychle se rozvíjejícím světě může mít schopnost sledovat vaše vozidla obrovský klid. To je místo, kde se do hry vstupuje na GPS Tracker. Vzhledem k tomu, že systémy sledování vozidel jsou nyní přístupnější než kdy jindy, je zásadní pochopit, proč by měl každý vlastník vozidla zvážit investování do spolehlivého sledovače automobilů.

V dnešním rychle se rozvíjejícím podnikatelském prostředí je efektivní správa aktiv rozhodující. Zadejte GPS sledovací systém, což je řešení, které integruje špičkové sledovací systémy, aby revoluci v tom, jak podniky spravují své aktiva. Se svou technologií špičkové úrovně systém sledování GPS zjednodušuje proces sledování aktiv a zvyšuje celkovou účinnost.

Sledování aktiv je zásadní pro zvýšení bezpečnosti v maloobchodních i půjčovnách. Zahrnuje monitorování fyzických předmětů prostřednictvím různých technologií, jako je platforma GPS ProTrack a Tracker ProTrack GPS. Pochopením, kde se aktiva nachází vždy, mohou podniky výrazně snížit riziko krádeže.

Pokud jde o financování vozidel, je zásadní mít spolehlivý systém sledování GPS. Platforma pro sledování GPS pro vystoupení je oblíbenou volbou mezi dlužníky i věřiteli a poskytuje klid při nákupu automobilu prostřednictvím možností financování.

Sledování GPS zcela změnilo hru pro firmy, které se spoléhají na flotily. Nástroje, jako je protack GPS Tracker, vám nejen poskytují jasný pohled na to, kde jsou vaše vozidla v kterémkoli daném okamžiku, ale také poskytují klíčová data, která mohou pomoci zefektivnit operace.